Robotics
programming and simulation
This page contains the draft text Robotics: programming and simulation.
Single file
A single pdf with all lectures can be downloaded here.

Individual lecture files
Click the thumbnails on the notes below to get a pdf version.
01.00 Introduction

01.01 Defining robots

01.02 Robot mechanicality

01.03 Robot sensitivity

01.04 Robot potency

01.05 Robot intelligence

01.06 Robot artificiality and artificial life
01.07 Robot autonomy and human robot collaboration

01.08 Exercises for Chapter 01
02.00 Embodiment
03.00 Robot mechanics
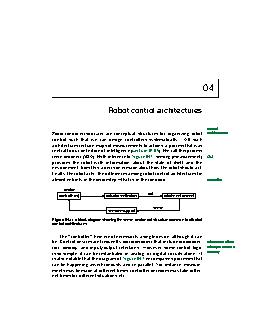
04.00 Robot control architectures
04.01 Deliberative control

04.02 Reactive control
04.03 Hybrid control
04.04 Behavior based control
04.05 Exercises for Chapter 04

05.00 Introducing ROS

05.01 ROS methodology

06.00 ROS basics

06.01 ROS graphs

06.02 ROS packages

06.03 Running and launching ROS nodes
06.04 Coordinate frame transformations

07.00 ROS topics

07.01 Publishing to topics

07.02 Subscribing to topics
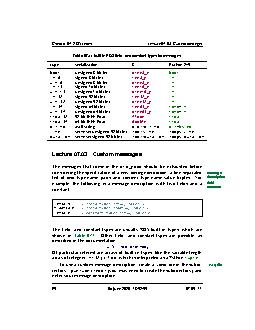
07.03 Custom messages
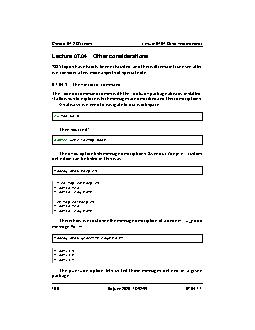
07.04 Other considerations
08.00 ROS services

08.01 Introducing ROS services

08.02 Serving and calling a ROS service
09.00 ROS actions

09.01 Introducing ROS actions

09.02 Serving and calling a ROS action
10.00 Bibliography

R1.00 Resource R1 Setting up the development environment
R2.00 Resource R2 Getting the textbook code
R3.00 Resource R3 Installing and configuring git