Dynamic Systems
This page contains fill-in notes on Dynamic Systems lectures from the courses ME 345 and ME 370.
Single file
A single pdf with all lectures can be downloaded here.
Individual lecture files
Click the thumbnails on the notes below to get a pdf version.

01.1 The systems approach
01.2 State.determined systems

01.3 Energy power and lumping
01.4 Mechanical translational elements

01.5 Mechanical rotational elements

01.6 Electronic elements
01.7 Generalized through. and across.variables

01.8 Generalized one.port elements
01.9 Exercises for Chapter 01 intro

02.1 Introduction to linear graphs

02.2 Sign convention

02.3 Element interconnection laws
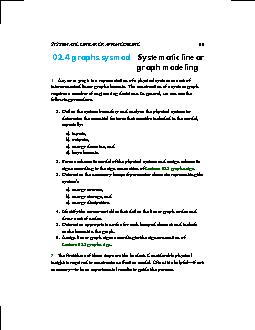
02.4 Systematic linear graph modeling

02.5 Exercises for Chapter 02 graphs
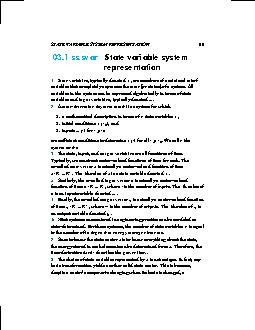
03.1 State variable system representation
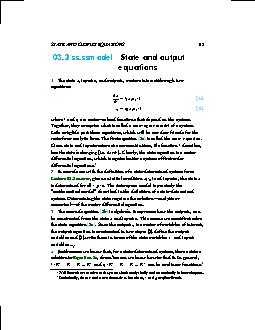
03.2 State and output equations

03.3 Normal trees
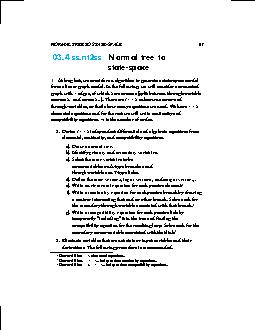
03.4 Normal tree to state.space
03.5 State.space model of a translational mechanical system

03.6 State.space model of a rotational mechanical system

03.7 Bridge between state.space and io differential equations
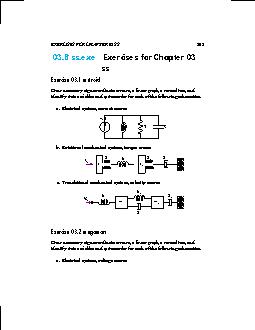
03.8 Exercises for Chapter 03 ss
04.1 Ideal transducers
04.2 Modeling with transducers
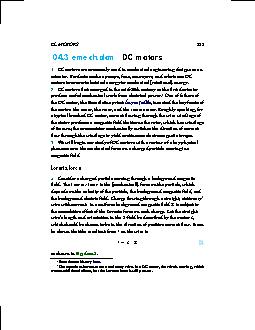
04.3 DC motors

04.4 Modeling a real electromechanical system

04.5 DC motor performance in steady.state
04.6 Transient DC motor performance

04.7 Driving motors

04.8 Exercises for Chapter 04 emech

05.1 Superposition derivative and integral properties

05.2 Equilibrium and stability properties

05.3 Vibration isolation table analysis
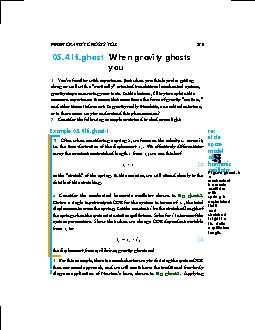
05.4 When gravity ghosts you

05.5 Exercises for Chapter 05 lti
06.1 Characteristic transient responses
06.2 First.order systems in transient response
06.3 Second.order systems in transient response
06.4 Exercises for Chapter 06 trans

07.1 Solving for the state.space response

07.2 Linear algebraic eigenproblem

07.3 Computing eigendecompositions

07.4 Diagonalizing basis

07.5 A vibration example with two modes
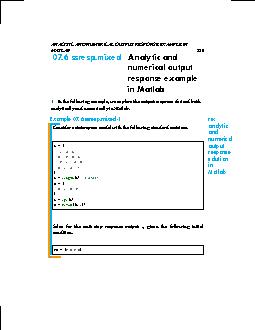
07.6 Analytic and numerical output response example in Matlab

07.7 Simulating state.space response

07.8 Exercises for Chapter 07 ssresp

08.1 Fluid system elements
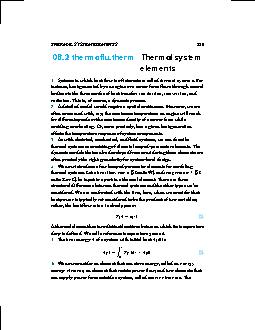
08.2 Thermal system elements
08.3 Fluid transducers

08.4 State.space model of a hydroelectric dam

08.5 Thermal finite element model
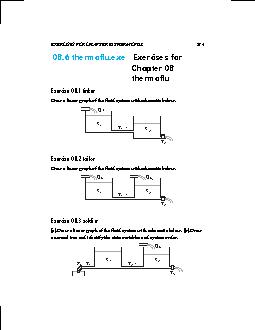
08.6 Exercises for Chapter 08 thermoflu

09.1 Fourier series

09.2 Complex Fourier series example
09.3 Fourier transform
09.4 Discrete and fast Fourier transforms
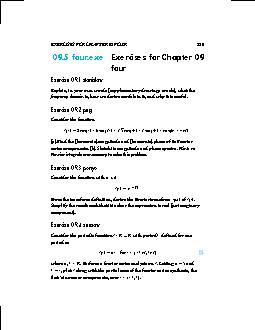
09.5 Exercises for Chapter 09 four

10.1 Frequency and impulse response

10.2 Sinusoidal input frequency response
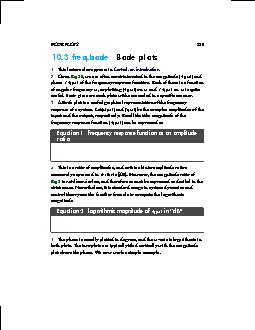
10.3 Bode plots
10.4 Bode plots for simple transfer functions

10.5 Sketching Bode plots

10.6 Periodic input frequency response
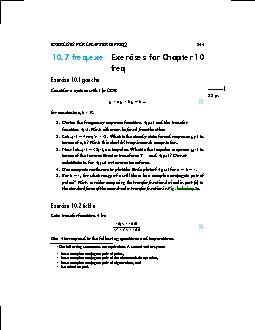
10.7 Exercises for Chapter 10 freq

11.1 Introduction
11.2 Laplace transform and its inverse
11.3 Properties of the Laplace transform
11.4 Inverse Laplace transforming

11.5 Solving io ODEs with Laplace
11.6 Exercises for Chapter 11 lap

12.1 Poles and zeros
12.2 Exploring transfer functions in Matlab
12.3 ZPK transfer functions in Matlab

12.4 Exercises for Chapter 12 tf

13.1 Input impedance and admittance

13.2 Impedance with two.port elements
13.3 Transfer functions via impedance

13.4 Impedance modeling example in Matlab

13.5 Norton and Th\ evenin theorems

13.6 The divider method
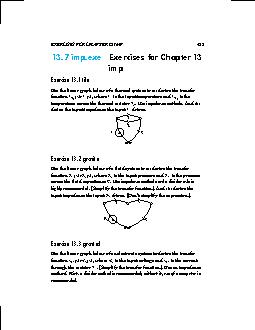
13.7 Exercises for Chapter 13 imp

14.1 Linearization
14.2 Nonlinear system characteristics

14.3 Exercises for Chapter 14 nlin
16.1 Nonlinear Systems in Python

16.2 Nonlinear systems in Matlab

16.3 Nonlinear fluid system example

16.4 Exercises for Chapter 16 sim

01.1 Quadratic forms

01.2 Trigonometry

01.3 Matrix inverses
01.4 Laplace transforms
02.1 Systems with repeated eigenvalues

03.1 Summary of system representations

03.2 Summary of one.port elements
03.3 Laplace transforms
03.4 Fourier transforms

04.1 Euler s formulas